
-


-


-



WeChat

-
WhatsApp


металлоискатель глубинник
Вот уже лет десять как работаю с глубинными металлоискателями, и до сих пор сталкиваюсь с одним и тем же заблуждением: многие считают, что если прибор называется ?глубинник?, то он гарантированно найдет всё на двух метрах. На деле же глубина обнаружения — это палка о двух концах, где многое зависит от грунта, размеров цели и даже от банального умения интерпретировать сигнал. Порой новички гонятся за дорогими моделями, а потом разочарованно пожимают плечами, когда тот же советский ?метр? в умелых руках выдает результат получше.
Что на самом деле скрывается за термином ?глубинный металлоискатель?
Когда говорю про металлоискатель глубинник, всегда уточняю: это не просто прибор с увеличенной глубиной, а скорее инструмент с особым принципом работы. Большинство моделей используют низкочастотные сигналы, которые меньше подвержены влиянию минерализации почвы. Но здесь же кроется и подвох — такие устройства часто плохо различают мелкие цели на поверхности, зато уверенно берут крупные объекты в глубине.
Помню, как на заброшенном хуторе под Воронежем мы с коллегой сравнивали два прибора: современный импортный глубинник и старый отечественный аналог. Иностранец стабильно показывал цели на 1.5-2 метра, но постоянно ?терял? монеты на полуметре. Наш же, хоть и требовал больше возни с настройками, выдавал четкую картину по всем слоям. Вывод прост: не бывает универсальных решений, каждый металлоискатель хорош для своих задач.
Кстати, о настройках. Многие производители сейчас добавляют автоматические режимы, но я всегда советую сначала освоить ручные. Потому что когда столкнешься с сильно замусоренным участком или грунтом с высокой электропроводностью, только тонкая ручная регулировка спасет ситуацию. Да, учиться дольше, но результат того стоит.
Практические аспекты использования глубинных моделей
В полевых условиях глубинник ведет себя совсем не так, как стандартные модели. Первое, с чем сталкиваются новички — это ложные срабатывания на влажный грунт. Особенно осенью, когда почва насыщена водой, даже опытные операторы иногда тратят время на проверку ложных целей. Научился определять такие моменты по характерному ?плывущему? сигналу — сначала четкий, а потом как бы расплывается.
Еще один важный момент — правильный подбор катушки. Для глубинных поисков лучше использовать монопетли большого диаметра, от 40 см и больше. Но здесь есть нюанс: чем больше катушка, тем хуже discrimination. Приходится идти на компромисс: либо глубина, либо точность определения типа металла. В большинстве случаев выбираю глубину, потому что на серьезных глубинах обычно лежат крупные объекты, где тип металла и так понятен.
Балансировка грунта — отдельная история. Современные приборы делают это автоматически, но я до сих пор иногда перехожу на ручной режим, особенно при работе на старых фундаментах. Там всегда много строительного мусора, который вносит искажения. Автоматика часто переусердствует с компенсацией, и можно пропустить интересную находку.
Типичные ошибки и как их избежать
Самая распространенная ошибка — неправильная интерпретация глубины. Многие думают, что если прибор показывает 2 метра, то копать нужно именно на эту глубину. На самом деле, цифры на дисплее — это ориентир, а не абсолютная истина. Глубина зависит от слишком многих факторов: ориентации объекта в грунте, его формы, степени коррозии. Не раз бывало, что прибор показывал 1.8 метра, а реально объект лежал на 1.2 — просто он был расположен плашмя.
Еще одна проблема — работа на замусоренных участках. Глубинные металлоискатели особенно чувствительны к этому, потому что ?видят? сразу несколько целей. Начинающие копатели часто бросают перспективное место после первых же ложных сигналов. А нужно просто сменить режим дискриминации или уменьшить чувствительность. Иногда помогает банальная смена направления движения — под другим углом картина часто проясняется.
Недооценка влияния электропроводности грунта — тоже частая ошибка. В черноземных регионах, например, глубина обнаружения может уменьшаться на 30-40% compared to sandy soils. Приходится постоянно делать поправку на это, иначе можно пройти мимо действительно ценных находок. Выработал для себя правило: первые полчаса на новом месте трачу исключительно на тестовые прогоны и калибровку.
Связь с промышленным оборудованием и неожиданные параллели
Как-то разговорился с технологом из ООО Аньхой Ланкэ Пэккинг Машинери — они занимаются упаковочным оборудованием, сайт у них https://www.ahrank.ru. Так вот, оказалось, что в их полностью автоматических упаковочных аппаратах используются датчики, работающие по схожему с металлоискателями принципу. Только там задача обратная — не найти металл, а убедиться в его отсутствии в упаковке пищевых продуктов.
Этот conversation заставил задуматься о том, как технологии из разных отраслей пересекаются. Например, их вертикальные пленочные упаковочные машины используют системы точного позиционирования, чем-то напоминающие системы навигации в современных металлоискателях. Или взять машины для вторичной упаковки — там тоже важна точность обнаружения объектов, хоть и на меньших расстояниях.
Кстати, на сайте https://www.ahrank.ru можно посмотреть их полностью автоматизированные линии упаковки и паллетирования — впечатляющее зрелище. Иногда думаю, что если бы в металлоискатели внедрить подобные алгоритмы обработки сигналов, которые используются в их оборудовании для фасовки муки, возможно, удалось бы решить проблему с ложными срабатываниями. Ведь в основе лежит та же задача — отличить полезный сигнал от шума.
Реальные кейсы и выводы из полевого опыта
Один из самых запоминающихся случаев произошел прошлой осенью под Казанью. Искали по старым картам место предполагаемого склада, и стандартные приборы показывали пустоту. Решили проверить глубинником — и на полутора метрах пошел четкий сигнал. Оказалось, это был проржавевший котел, который из-за сильной коррозии не давал нормального отклика на высоких частотах.
Еще пример: на северо-западе России часто встречаются грунты с высоким содержанием железа. Там обычные металлоискатели просто ?сходят с ума?, а глубинные с правильными настройками работают вполне стабильно. Правда, приходится жертвовать чувствительностью к мелким объектам, но для поиска крупных артефактов это оправдано.
Из всего этого можно сделать простой вывод: металлоискатель глубинник — это не волшебная палочка, а специализированный инструмент. Его эффективность на 80% зависит от оператора и только на 20% от технических характеристик. Нужно понимать его сильные и слабые стороны, уметь адаптироваться к условиям и, самое главное, — не ждать мгновенных результатов. Как и в любом деле, здесь важны опыт и терпение.
Перспективы развития глубинного оборудования
Судя по последним тенденциям, производители постепенно отказываются от простого наращивания глубины в пользу интеллектуальных систем анализа. Уже появляются модели, которые могут строить простейшие 3D-карты подземного пространства, правда, пока это дорогое удовольствие. Думаю, через пару-тройку лет такие технологии станут доступнее.
Еще одно интересное направление — совмещение различных методов детекции. Например, некоторые экспериментальные модели сочетают электромагнитный и радиолокационный принципы. Пока это сырые разработки, но потенциал огромный. Представьте: металлоискатель, который не только находит объект, но и показывает его форму и ориентировочный размер.
Лично я жду появления более совершенных систем дискриминации. Современные глубинники все еще плохо справляются с разделением цветных и черных металлов на большой глубине. Если удастся решить эту проблему, это будет настоящий прорыв. Возможно, помогут алгоритмы машинного обучения, подобные тем, что используются в промышленном оборудовании — например, в тех же автоматических упаковочных линиях, которые производит ООО Аньхой Ланкэ Пэккинг Машинери.
Соответствующая продукция
Соответствующая продукция



Самые продаваемые продукты
Самые продаваемые продукты-
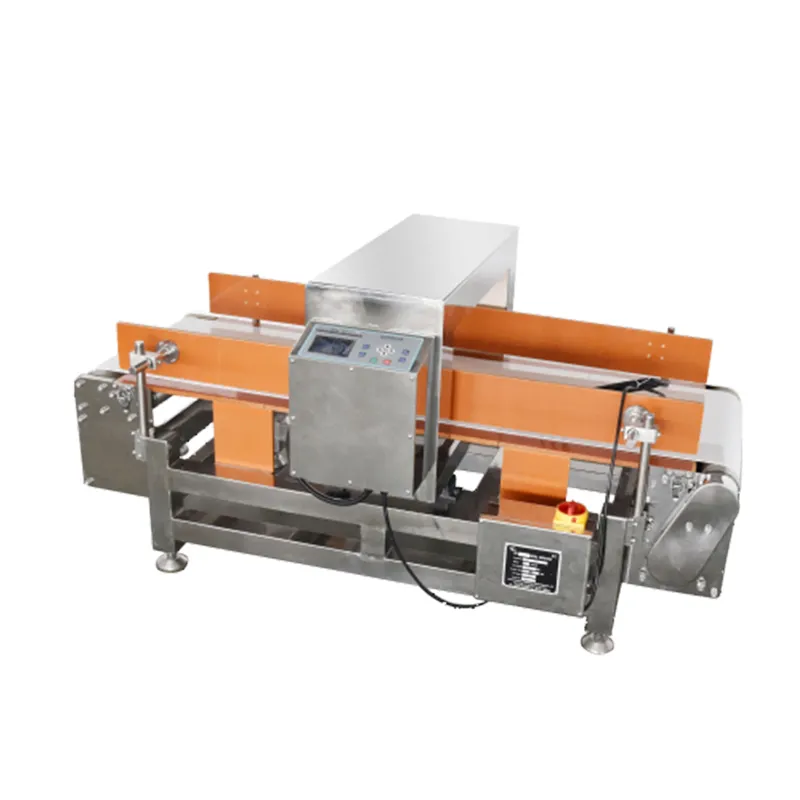 Металлодетектор
Металлодетектор -
 Полностью автоматизированная линия упаковки и паллетирования
Полностью автоматизированная линия упаковки и паллетирования -
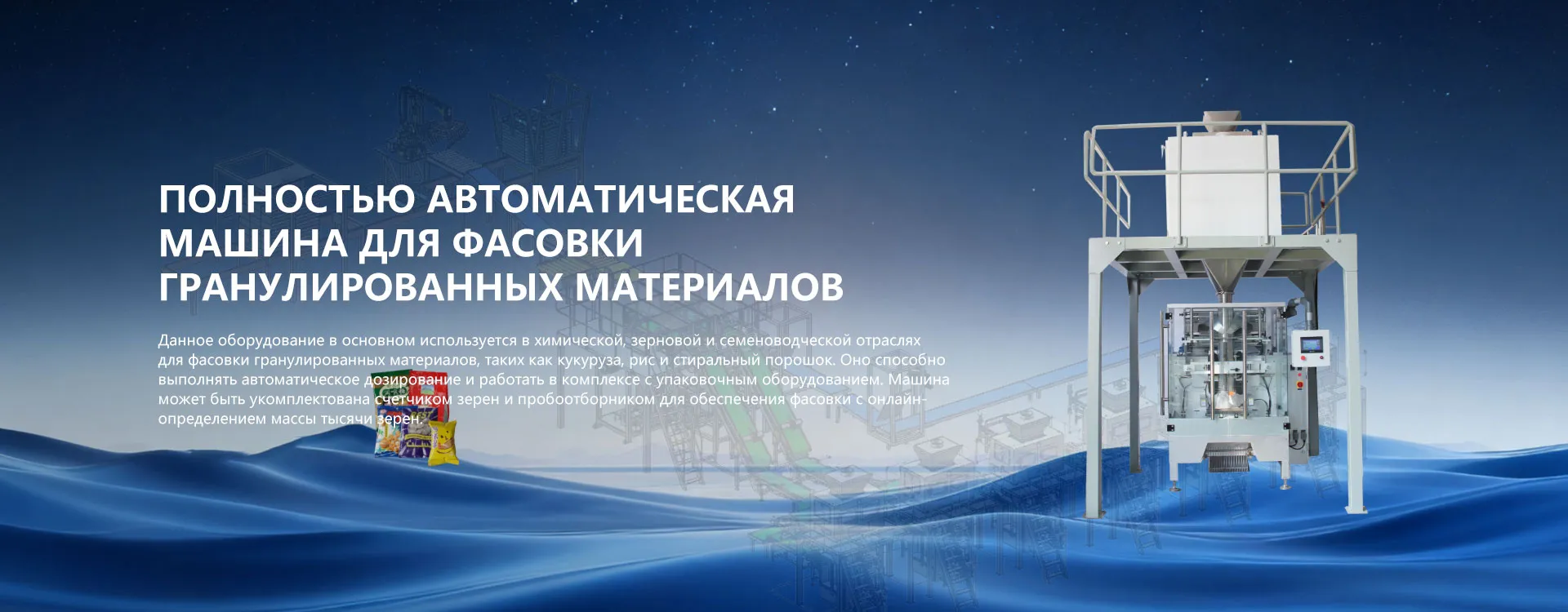
 Вертикальная фасовочно-упаковочная машина RK420
Вертикальная фасовочно-упаковочная машина RK420 -
 Полностью автоматическая машина для упаковки с мерными чашами
Полностью автоматическая машина для упаковки с мерными чашами -
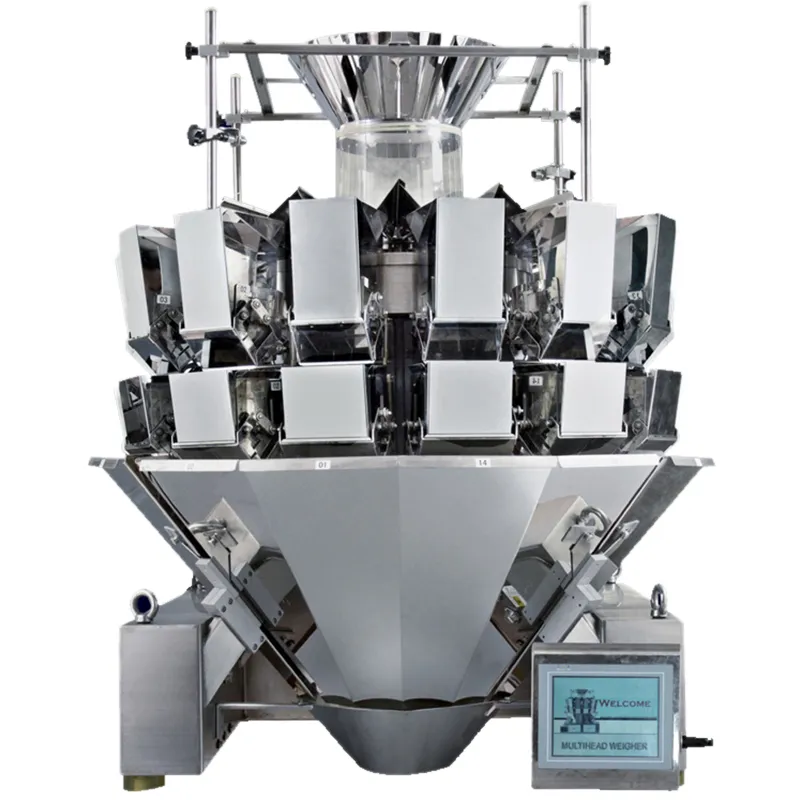
 Четырёхголовочные весы
Четырёхголовочные весы -
 Шнековый дозатор
Шнековый дозатор -
 RK1100 Полностью автоматическая упаковочная машина
RK1100 Полностью автоматическая упаковочная машина -
 Автоматическая двухстанционная мукомольная упаковочная машина с захватом мешков
Автоматическая двухстанционная мукомольная упаковочная машина с захватом мешков -
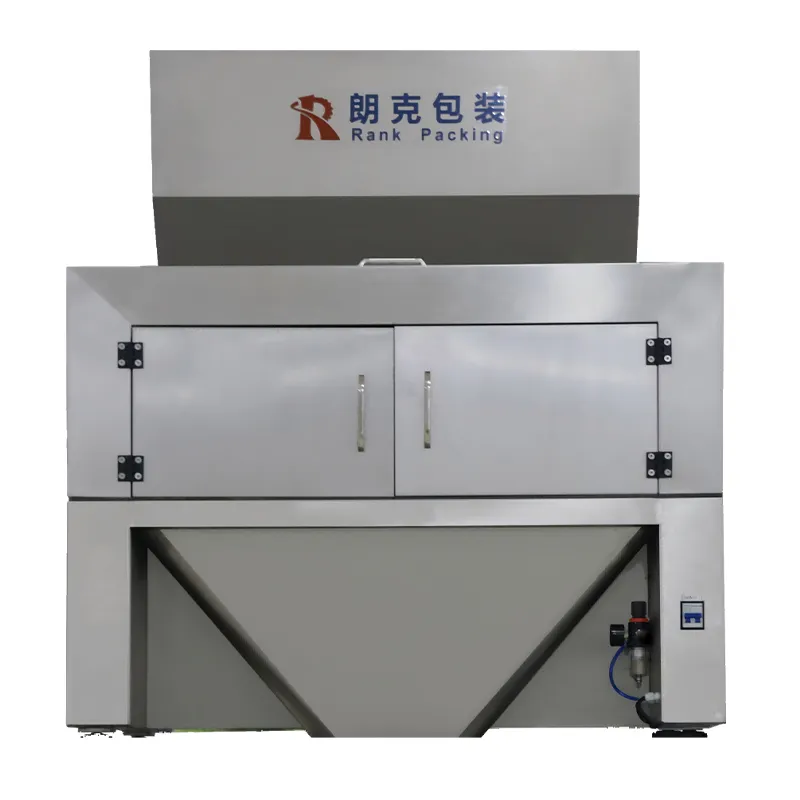
 Полностью автоматическая машина для фасовки муки в бумажные пакеты
Полностью автоматическая машина для фасовки муки в бумажные пакеты -
 Вертикальная фасовочно-упаковочная машина RK720
Вертикальная фасовочно-упаковочная машина RK720 -
 Машина для упаковки в мешки
Машина для упаковки в мешки -
 Автоматическая комбинационная весовая упаковочная машина
Автоматическая комбинационная весовая упаковочная машина
Связанный поиск
Связанный поиск- Прошла через металлоискатель беременная поставщик
- Как проходить металлоискатель поставщики
- блютуз для металлоискателя
- частоты катушек металлоискателей
- Упаковочная машина для запечатывания коробок
- Металлоискатель цель поставщики
- Можно ли беременным через металлоискатель производитель
- Металлоискатель охранника поставщики
- Датчики металлоискателей цена
- вертикальная фасовочно упаковочная машина